The CircuitPython Circuit Playground Express Sound and Light Project
On 2/23/19 I taught my first “Introduction to Python” workshop at Ocean State Maker Mill. What a great experience getting a chance to interact with everyone that attended. The class slides and code are available on GitHub.
Class Description:
Introduction to Python using: Adafruit CircuitPython & Circuit Playground Express
This workshop is designed to be a fun introduction to the Python language and micro-controllers.
This is a hands on interactive workshop!
Over 3 hours we will explore programming concepts with Python while we implement a project to translate sound into a colorful light display. This is a beginner class, no prior programming experience is needed.
We will cover:
- How to install CircuitPython on the Circuit Playground Express - Installing the Mu Python editor - Basic Python concepts, syntax, data types, operators, and expressions - How to use Python to interact with the Circuit Playground Express
At the completion of the class you will have your own Circuit Playground Express to take home, programmed in Python to create a colorful light display in response to sound. You will be on your way to creating your own interactive projects!
Up until a few weeks ago the ESP32 version of MicroPython was missing support for APA102/DotStar LEDs. Now there are two drivers to choose from. One written by Matt T that focuses on simplicity and performance. Matt’s library is based on the Adafruit DotStar library back ported to MicroPython. The main difference between Matt’s code and Adafruit’s is that Matt’s code requires an SPI object and Adafruit’s requires separate Pin objects for Clock and Data. I look forward to trying this library on my next project after I upgrade to MicroPython 1.10. You can find Matt’s library here: https://github.com/mattytrentini/micropython-dotstar
The other MicroPython ESP32 APA102/Dotstar library was written by me. At the time I started the project I didn’t know that Matt was working on his library. In any case I needed a working APA102/DotStar library for a project using MicroPython 1.9.4. so I wrote one! At this point my library is probably only of historical interest.
My class implements the Adafruit DotStar API, the MicroPython ESP8266 APA102 API, and the MicroPython SPI DotStar API. The code is derived from the Adafruit DotStar CircuitPython class and back ported to MicroPython. The focus of this implementation is backward compatibility, performance was a secondary goal. If GPIO pins are specified for clock and data the older lower performance “bit banging” technique is used rather than the newer software SPI technique. This preserved the existing API that only required clock and data pins instead of an SPI object.
This implementation has only been tested on the ESP32 and MicroPython 1.9.4
Two example/test files are included. The examples show simple class usage and some variations on the Adafruit DotStar examples that are more compact.
I just discovered a new (to me) MicroPython IDE, uPyCraft by DFRobot. It’s a great little IDE modeled along the lines of the Arduino IDE. It has cross platform support: Windows, Linux, and Mac. It supports multiple ESP versions. I tested with a WEMOS D1 Mini Lite with no issues. However, I did not try to flash the firmware.
I had one minor issue with the uPyCraft installation on Windows. uPyCraft requires the SourceCodePro font and has trouble locating the version I had installed.
If you click “OK” you can install the font. If you click “Cancel” the font file is copied to your desktop. You can right click the font file to install it. Once the font is installed uPyCraft ran without issues.
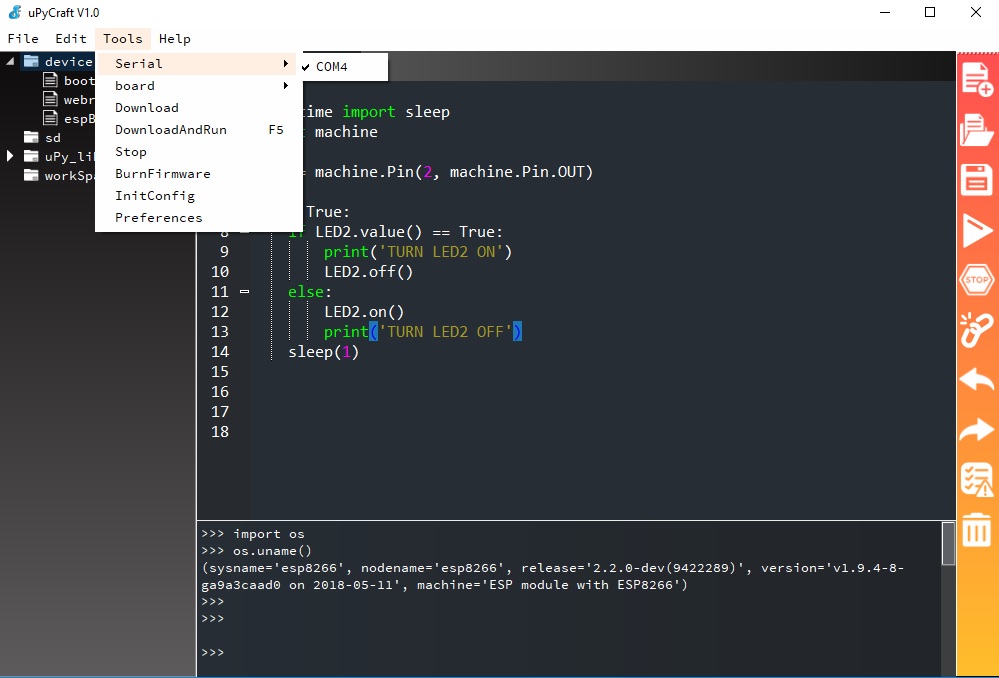
To connect to your ESP board click on the ESP serial port, Tools->Serial-><COMx> . You can also click on the Connect/Disconnect icon, the chain icon, on the right tool bar.
DFRobot includes a nice set of examples with uPyCraft. The REPL window supports editing keys and command recall. The files on your ESP are listed on the left under “Device”. Right clicking on a file gives you a list of options, including editing in place, running, deleting.
Very nice, clean, easy to use design. In my limited testing uPyCraft was reliable with no issues.
To complete our ESP on the cheap development environment we need some additional tools to turbocharge our productivity. I did a survey of available tools and found two that meet the criteria for Windows, Mac, and Linux cross platform support and have multiple ESP board vendor support. The first tool is a command line utility that makes it a breeze to perform file operations and run MicroPython programs on the ESP: Adafruit’s ampy. The second tool is the Pycharm IDE with the MicroPython plugin.
First, let’s take a look at “ampy”. “ampy” provides simple, but vital, ESP file system functionality, reliably. The usage information below spells it out clearly.
ampy - Adafruit MicroPython Tool
Ampy is a tool to control MicroPython boards over a serial connection.Using ampy you can manipulate files on the board's internal filesystem and even run scripts.
Options:
-p, --port PORT Name of serial port for connected board. Can optionally
specify with AMPY_PORT environment variable. [required]
-b, --baud BAUD Baud rate for the serial connection (default 115200).
Can optionally specify with AMPY_BAUD environment
variable.
-d, --delay DELAY Delay in seconds before entering RAW MODE (default 0).
Can optionally specify with AMPY_DELAY environment
variable.
--version Show the version and exit.
--help Show this message and exit.
Commands:
get Retrieve a file from the board.
ls List contents of a directory on the board.
mkdir Create a directory on the board.
put Put a file or folder and its contents on the...
reset Perform soft reset/reboot of the board.
rm Remove a file from the board.
rmdir Forcefully remove a folder and all its...
run Run a script and print its output
At the opposite end of the power and complexity spectrum we have PyCharm. PyCharm is a full featured, professional, powerful, integrated development environment (IDE) for Python. The community edition is FREE. There is great documentation available for PyCharm so I am not going to discuss all its features and installation instructions here. I am just going to focus on the MicroPython plugin. The plugin is available on github: https://github.com/vlasovskikh/intellij-micropython
However, you can install and configure the Micropython plugin from within PyCharm. That’s what we are going to do.
Go to File->Settings->Plugins->Install JetBrains Plugins, search for MicroPython and install the plugin.
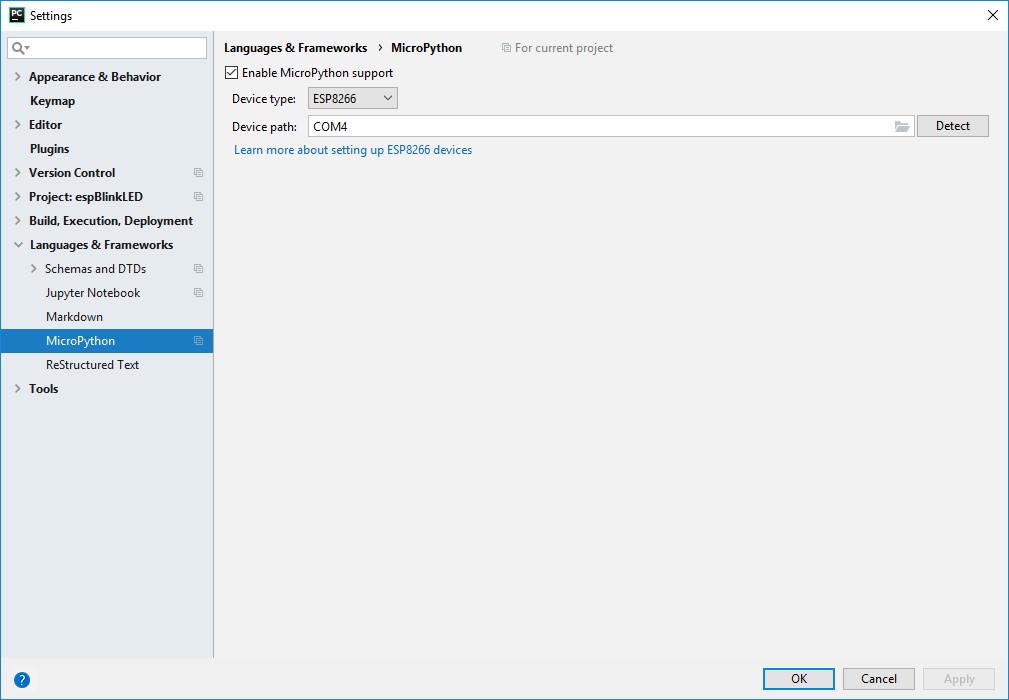
Next, go to File->Settings->Languages & Frameworks->MicroPython
On Windows the plugin did not detect my WEMOS D1 MINI ESP8285. I had to enter the COM port manually. In my case COM4. Select your device type, the ESP8285 is equivalent to an ESP8266. Enable MicroPython support.
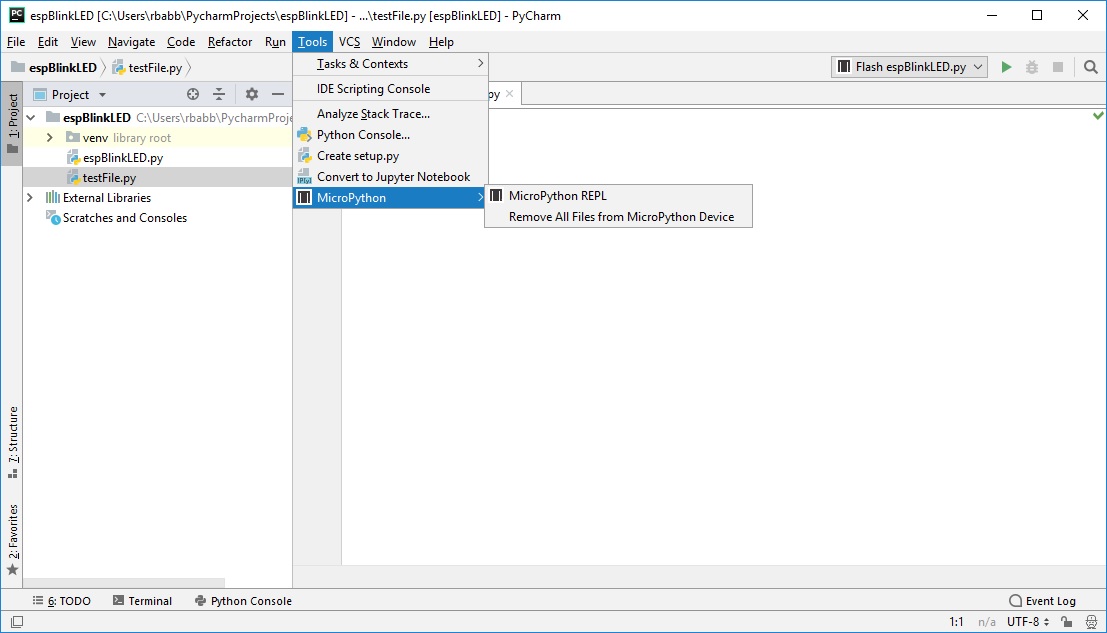
Plug in your ESP board if you haven’t already. We will bring up the ESP REPL to verify that our installation is working. Select Tools->MicroPython->MicroPython REPL.
I had to hit the reset button on my ESP to get it to work the first time. After that I didn’t have any issues.I found that none of the text editing keys worked in the REPL window, backspace, command recall, etc. So keep that in mind if you are planning to do extensive work in REPL. You may want to just open a terminal session (PuTTY on Windows).
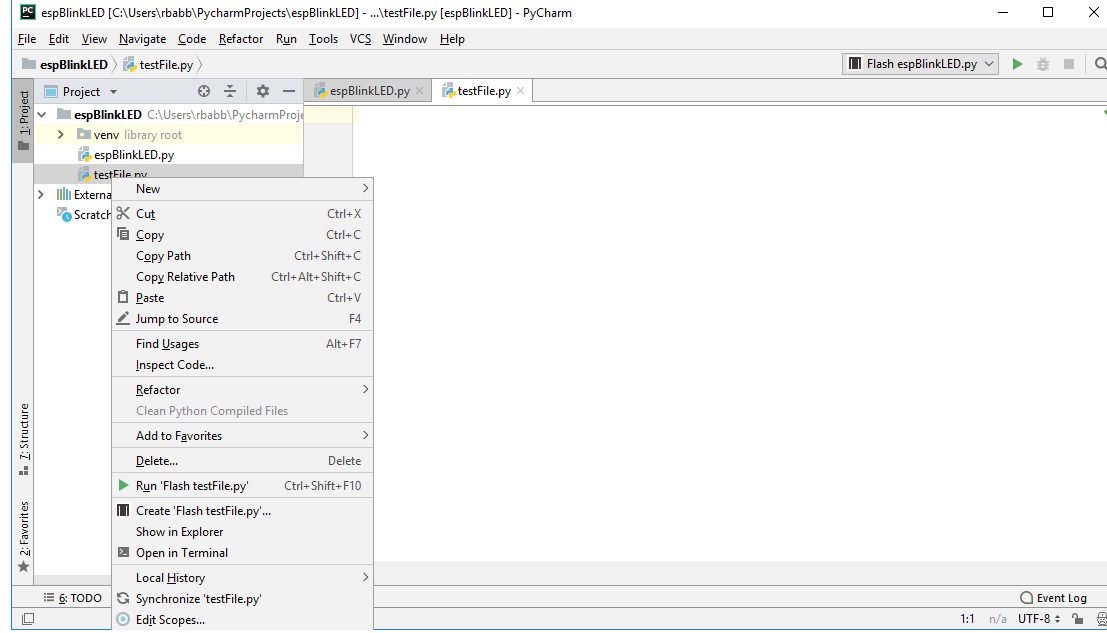
To transfer files to the ESP you create a “flash” configuration, by right clicking on the file.
Once created it is a simple matter to run the configuration and copy the file to the ESP.
You can now work directly with your ESP (or other) MicroPython board without having to leave PyCharm!
But wait, there is more! The MicroPython plugin also includes support for context aware completion and documentation (ctrl-Q), syntax checking, and type checking. Go PyCharm!
In this post we will be covering how to connect to the MicroPython interpreter (REPL) over the wireless network. MicroPython includes a web interface to REPL and file transfer. MicroPython supports a web interface that provides REPL (Read Execute Print Loop) access and file transfer capability. Before we can access WebREPL we need to bring up the ESP’s wireless access point.
The ESP family supports both station and access point WiFi operation and a wide variety of encryption algorithms for WiFI security. In this post we are just going to cover bringing up the ESP as an access point to get WebREPL running.
Connect to your ESP REPL via USB and serial terminal. See the previous post if you need to flash and configure your ESP for access via USB.
At the REPL prompt:
>>> import network
>>> ap_if = network.WLAN(network.AP_IF)
>>> ap_if.active(True)
>>> ap_if.ifconfig()
('192.168.4.1', '255.255.255.0', '192.168.4.1', '208.67.222.222')
>>> import webrepl_setup
WebREPL daemon auto-start status: disabled
Would you like to (E)nable or (D)isable it running on boot?
(Empty line to quit)
> E
To enable WebREPL, you must set password for it
New password (4-9 chars): upythoN
Confirm password: upythoN
Changes will be activated after reboot
Would you like to reboot now? (y/n) y
... ( bunch of build dependent output ) ...
WebREPL daemon started on ws://192.168.4.1:8266
Started webrepl in normal mode
ESP32 Notes: As of 7/2018 the stable 5/11/2018 ESP32 build “webrepl_setup” import didn’t work for me. However, the daily ESP32 build did work correctly.
See the previous post if you need to flash your ESP32 with a new build. Another difference between the ESP32 build and ESP8266 build, the ESP32 network came up as an Open network, the ESP8266 as secure. I’m not sure if this behavior will change in a future build, just something to be aware of. This is OK for quick prototyping but in a production environment you would want to configure WiFI security.
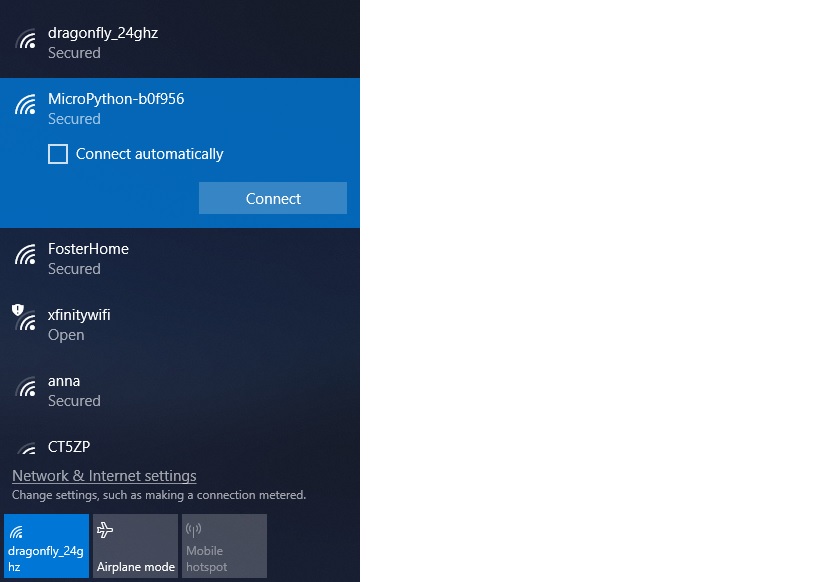
D1 Mini Lite AP
You should now see an ESP access point available. Don’t connect to it yet! We need to copy a few files from GitHub before we disconnect from the internet connected WiFi ( assuming you are connected to a WiFi access point).
The MicroPython WebREPL uses a WebSocket to communication so we need to download a web client to access the board. You can download the WebREPL client from GitHub here. Unzip the file and navigate to the directory containing “webrepl.html”
webrepl files
Switch your WiFi connection to the ESP_XXXX access point (AP).
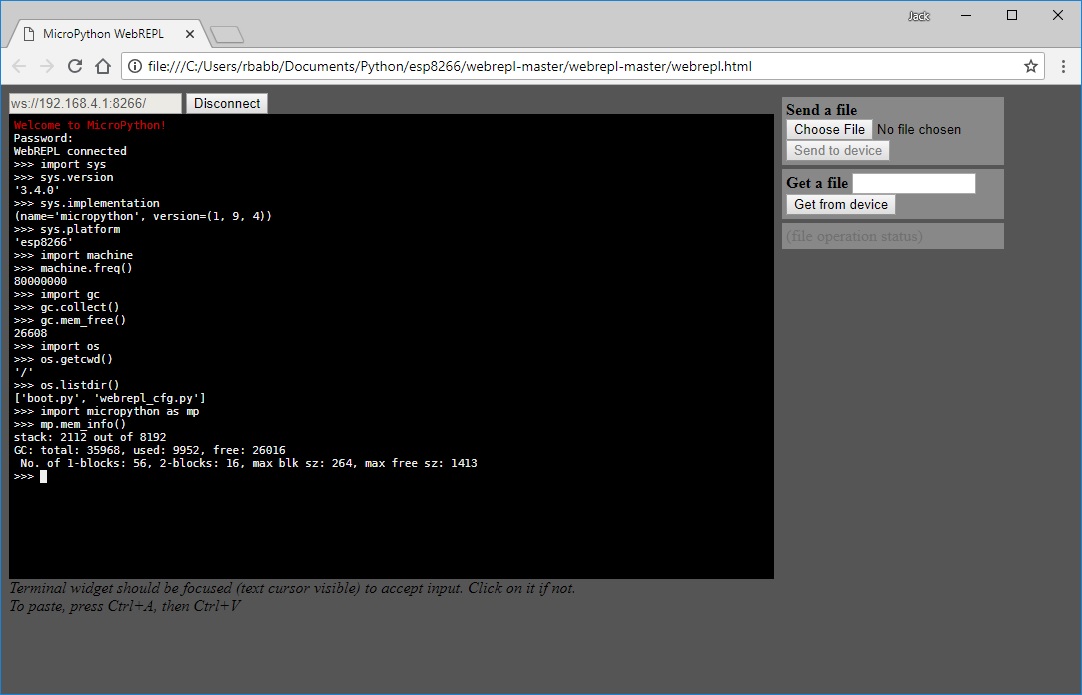
Open “webrepl.html” in your browser, chrome or firefox is recommended. The ip address is preset to match the MicroPython AP defaults. Click on the connect button. You should now have a working WebREPL session over WiFi to your ESP! You are no longer limited to a tethered connection! Freedom! WebREPL is great for updates, quick changes, and interactive testing. Here are a few useful command to test that your ESP and WebREPL are working correctly:
Webrepl Session
Congratulate yourself! You now have a working MicroPython ESP board with WiFi and wireless access to REPL and file transfer. We showed some commands to explore the ESP MicroPython environment, checking on the amount for free memory, listing files, and accessing system information.
The Expressif ESP8266 is THE inexpensive IoT platform for makers and professional IoT developers. Over 100 million ESP chips have been sold.
What makes the ESP8266 family so special? Why should you bother with it? The answer is: it has WiFi, a capable processor, great development options, great support, and finally, PRICE. All the Expressif SOCs (System On a Chip) are available on boards costing under $10 US in 2018.
The Expressif ESP family of SOCs launched a revolution in low cost WiFi development boards.
In 2014 Expressif released the ESP8266EX a SOC combining processor and WiFi in a low cost package. In 2016 the more powerful ESP32, adding Bluetooth, was released. A lower cost version of the ESP8266EX, the ESP8285 with 1MB of integrated flash was also released in 2016. A wide variety of development languages and environments support the ESP family: C/C++, Python, LUA, Arduino, MicroPython, MongooseOS, FreeRTOS. We are only going to be looking at Python for now.
From the left: ESP8285, ESP8266, ESP32
So, how do you choose a Python development board and environment?
We will show you how! It’s easy!
We are only focused on Python, so that eliminates all the other development environments and leaves us with only Micropython and CircuitPython.
Adafruit developed CircuitPython, a variation of MicroPython, focused on supporting Adafruit boards, such as the Circuit Playground, Huzzah32, etc.
You can find out more about Adafruit CircuitPython boards here.
The next criteria is cost. Adafruit makes a great product, but they cost more than a mystery brand board available on ebay or Amazon. Don’t get me wrong I love Adafruit products and CircuitPython. Adafruit has some great low cost boards that support CircuitPython, the Trinket M0 is only $8.95! Unfortunately, the Trinket M0 doesn’t include WiFi. The Adafruit boards provide extra features for that additional cost, built in RGB LEDs, battery connectors, builtin sensors. Details of the differences between MicroPython and CircuitPython can be found here.
So, For “IoT on the Cheap” that leaves us with MicroPython and “generic” ESP boards. We still have three choices of boards based on Expressif chips: ESP8285, ESP8266, and ESP32. To keep costs low support circuitry around the ESP chips is kept to a minimum. The board designs are open source.
Wemos D1 Mini Lite
HiLetgo ESP8266 NodeMCU
HiLetgo ESP32 NodeMCU
Cost
$4.00
$6.00
$10.00
MCU
ESP-8285
ESP-8266
ESP-32S
ADC
1 10-Bit
1 10-Bit
18 12-Bit
GPIO
11
17
36
Wifi
Yes
Yes
Yes
Bluetooth
No
No
Yes
CPU
Xtensa 1 core L106
Xtensa 1 core L106
Xtensa 2 core LX6
Speed
80Mhz
80Mhz
160Mhz
SRAM
~50KB
~50KB
~520KB
Flash
1MB
4MB
4MB
Touch Sensor
No
No
Yes
SPI/I2C/I2S/UART
2/1/2/2
2/1/2/2
4/2/2/2
Temperature Sensor
No
No
Yes
The decision of which board to use is fairly straight forward, if you need more I/O, processing power, or storage, you need to move to a more expensive board.
The tool chains for all the boards are identical. However, there are some critical differences in the settings required to setup the boards. The ESP32 MicroPython image also has different defaults on some values than the ESP8266 boards.
Next steps: Setting up the boards for MicroPython on Windows.
What you will need:
ESP Board (one of the following)
ESP32 ESP-32S Development Board ($10.99 on Amazon)
ESP8266 NodeMCU LUA CP2102 ESP-12E ($6.50 on Amazon)
Wemos D1 Mini Development Board ESP8285 V1.0.0 1MB ($4.94)
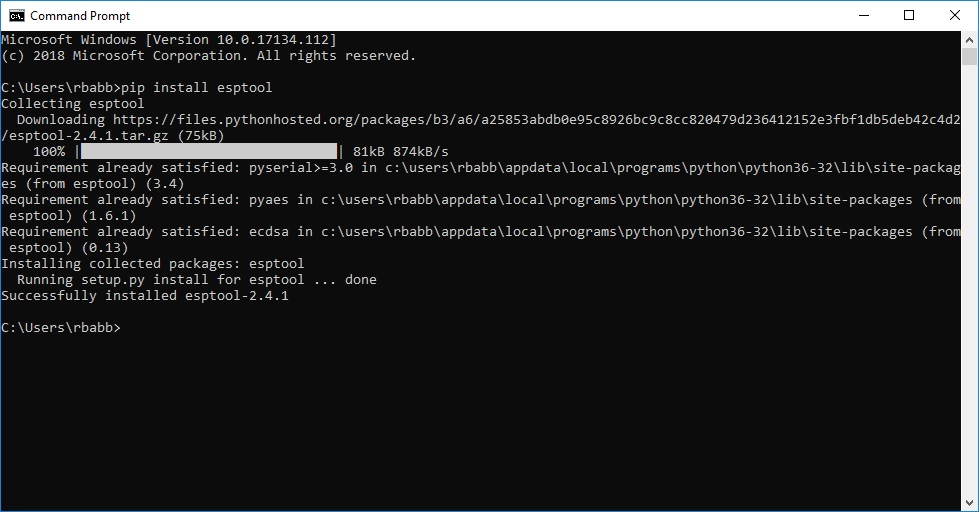
The esptool -h command will also display version and full usage information.
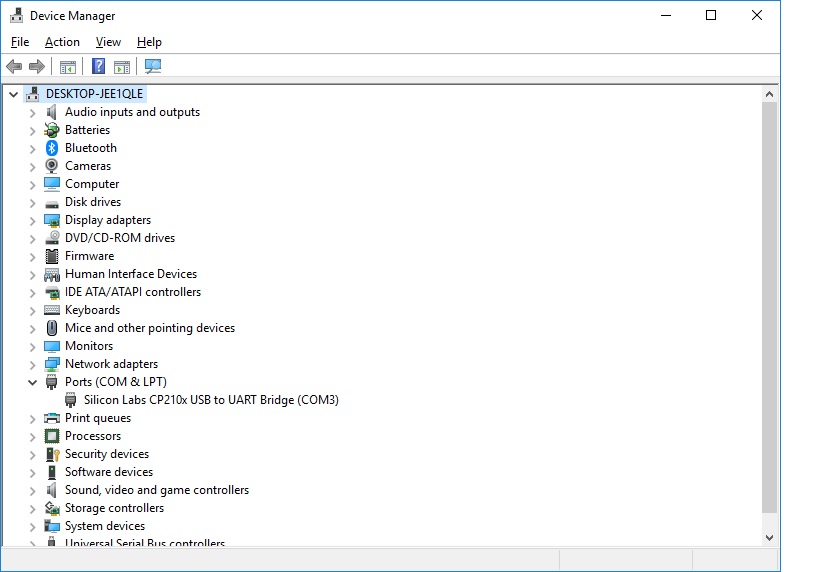
Now for some fun! Connect the ESP board to your PC using a USB cable.
You should see a new serial port in the device manager. The ESP board should appear as a COM port under “Ports”.
If the firmware was written successfully you will see output similar to the following:
esptool.py v2.4.0Connecting....Detecting chip type... ESP8266Chip is ESP8285Features: WiFi, Embedded FlashMAC: 60:01:94:b0:f9:56Uploading stub...Running stub...Stub running...Configuring flash size...Auto-detected Flash size: 1MBFlash params set to 0x0320Compressed 604872 bytes to 394893...Wrote 604872 bytes (394893 compressed) at 0x00000000 in 35.2 seconds (effective 137.6 kbit/s)...Hash of data verified.
Install Putty (Tera Term can be used as an alternative. However, I found setup more error prone.) I created and saved my settings as “MicroPython”. The next time you connect you can just load the correct settings.
Putty ESP8266 Connect
Make sure the Serial settings are configured as no parity or flow control.
Putty ESP8266 Settings
Connect to the board. You should now see a REPL prompt.
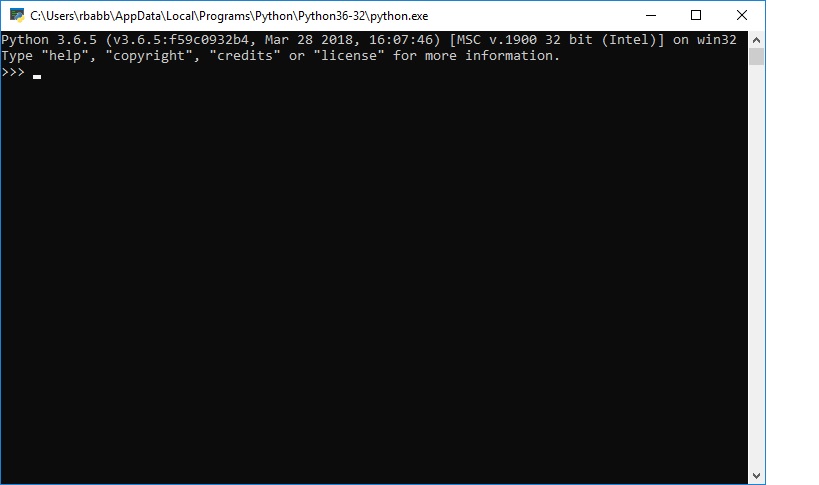
A quick check of the Python version will verify that REPL is working.
>>> import sys
>>> sys.version
'3.4.0'
Congratulations you now have a working MicroPython installation!
Over the past few weeks I have been experimenting with 3D printing at the Ocean State Maker Mill ( OSMM ). My first step was to take one of the OSMM 3D printing classes.
OSMM Intro to 3D Printing Class:
The instructor, Matt Stultz, 3D printing expert, author, and enthusiast, shared his experience and insights during this excellent overview of 3D printing.
What follows are my musings based on Matt’s class.
All errors: grammatical, factual, and social, are mine, not Matt’s.
Fuzzy cell phone photo of OSMM 3D printed test objects
The class provided a survey of the current state of additive manufacturing, also known as 3D printing, or FDM (Fused Deposition Modeling), or FFF (Fused Filament Fabrication).
FDM and FFF refer to the same thing. The two terms developed for legal, copyright, trademark, etc. reasons.
Guess what, there is a Wikipedia page that explains all this stuff: acronyms, concepts, principles, etc.
So I don’t have to!
You can find all the gory details here: https://en.wikipedia.org/wiki/Fused_filament_fabrication
The most common 3D printers use various types of plastic to fabricate objects. The most common plastic is PLA. A bio-plastic made from starch, corn starch in the USA.
Really, chemistry is so cool, plastic from corn.
Simplify3d has a nice overview of 3D printing materials here.
You don’t have to have a 3D printer to take advantage of additive manufacturing, and you don’t have to be limited to plastics. Fabrication services like: Shapeways, Sculpteo, and other services, will take your design files and fabricate your design and ship you the results.
There are other 3D printing technologies available besides FFF/FDM. Most are outside the realm of what hobbyists can afford. However, they do offer an amazing range of capabilities and materials. You can find an overview of more advanced additive manufacturing technologies here.
Once the landscape of 3D printing was covered we moved on to the details of how you actually create an object.
The process involves several steps: design using CAD, CAM using a “slicer”, and finally the 3D printer and controller.
Your design has to take into account the limitations of 3D printing. One key limitation is “overhangs”. You can’t print on nothing! It is possible to generate support structures that can be removed after printing. If your design has features that are not directly supported you need to plan on how to deal with the issue. Sometimes you can change the orientation of design. For example, printing a mushroom upside down. Other times you will need to add support structures to the design. Sometimes the CAD/CAM software can generate supports for you. A detailed explanation is available here.
You can also use existing designs for free or a small fee. There are thousands of designs available. If you can imagine it, the chances are someone else has too.
Here are a few websites that provide access to designs: Thingiverse Youmagine Myminifactory
Now that you have a design file (.stl) you need to translate it into instructions (gcode) for the specific printer you will be using. Most 3D printers come with a “slicer” package based on the CURA open source slicer that has been adapted by the manufacturer for it’s printers. CURA will allow you to modify the design, tune the print settings, and format the data for the printer. For the class we used Lulzbot Cura to explore the features and settings available.
Lulzbot Taz
My first 3D printing projects:
So, Why bother with 3D printing?
Other than because it’s fun and just so darn cool to make your own stuff…
And could save you money, really, a study was done that estimated between $300 and $2000 a year in savings. The article is here, the study here.
So, what can you make with a 3D printer? Just about anything.
Personally, I am interested in designing custom cases for my art and electronics projects.
For my first attempts I chose simple, small, designs that had already been printed successfully. I download files from Thingiverse for a Raspberry Pi Zero case and a miniature flower pot.
My first attempt was to print a Raspberry Pi Zero case on the Lulzbot Taz printer.
I found the Lulzbot Cura software easy to use and intuitive to learn. The files are transferred to the printer via SD card and selected via a front panel interface. Again, I found it easy to use and understand.
Two important points:
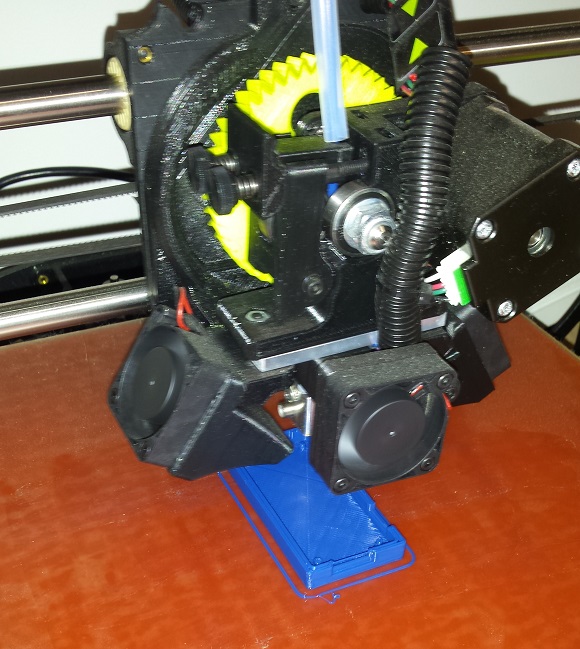
The first, getting the first layer to adhere to the bed of the printer is critical, and one of the most common issues for novices. I discovered this firsthand on my initial print attempt:
Matt came to the rescue and demonstrated how a bit of Elmer’s washable stick glue applied to the bed can solve the adhesion problem.
The second point, 3d printing can be a slow process. There is a trade-off between quality and speed. I selected the fastest, lowest quality setting, the small 1.5″ x 3″ x .5″ box took about an hour.
The final result a useful Rpi Zero case:
My second project, a small flower pot, printed on the Lulzbot Mini with an Octoprint interface running on a Raspberry Pi. The only challenge was getting my Windows laptop to see the Raspberry Pi. It turned out I needed to install “bonjour print services for windows” as described in the FAQ. Once I connected to the Octoprint interface I found it easy and intuitive to use. Oh, another tip, make sure you are targeting the right printer in CURA. I forgot to change the printer from Taz to Mini, no harm done, but my print would have failed if I hadn’t noticed the printer acting “funny” when attempting to calibrate and start the print.
Which brings me to another tip from the class, always make sure you watch the first layer being printed so you can detect problems early.
I attended an “Intro to CNC” class at the Ocean State Maker Mill on Saturday January 20th.
The class provided an overview of the CNC (Computer Numerical Control) process. The entire workflow: design, CAD, CAM, CNC set up, and finishing. Many small CNC machines use the Dewalt 611 Router. So if you have experience using a router you are off to a good start. I used a router for some small home projects, but never really gave much thought to router bits other than the shape. There is more to router bits and end mills than I ever imagined: up cut, down cut, compression. Tomes have been written on the subject. Why? Because it turns out to be really important when you want to reliably produce a quality result. If you are yearning to learn more about bits, um, I mean, end mills, you can check out this article in Popular Woodworking.
When you have a robot doing the work for you it can’t always compensate when things go astray the way a human can. Attention to detail is a must: measure the thickness of your material, make sure it is fastened down securely, check clearances, calibrations. Safety first: ear and eye protection, dust mask, NO gloves !
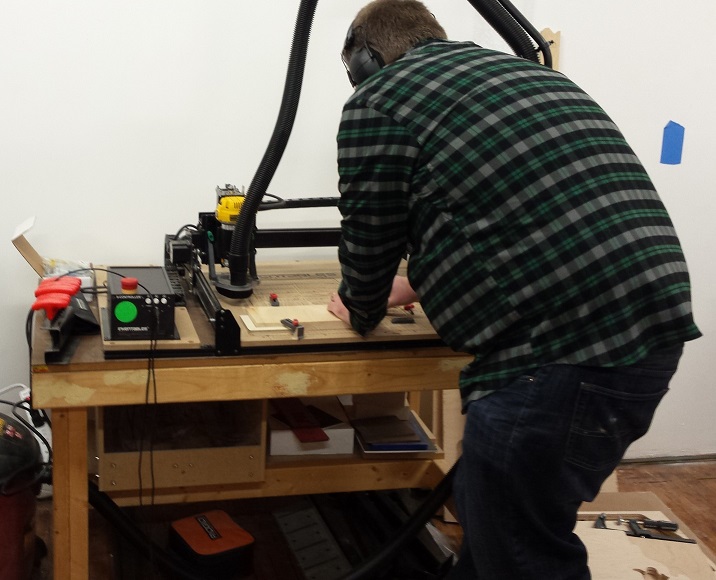
After covering the general principles we got down to the specifics using a small sign as a sample project targeting the Inventables X-Carve CNC. The project was designed in the Inventables Easel free design system.
The BeagleBone Black (BBB) is based on a 1Ghz TI Sitara XAM3359AZCZ100 Cortex A8 ARM processor. Similar to the Raspberry Pi, the BeagleBone Black includes: HDMI output, Ethernet, and it runs a version of Linux. The default distribution is Angstrom Linux. You can find other BeagleBone Black compatible distributions here. The BBB excels at I/O it supports: 65 GPIOs, 3 I2C buses, a CAN bus, an SPI bus, 5 serial ports, 8 PWM outputs, and 7 analog inputs. The BBB also supports expansion boards, called “capes”. However, Not all capes are compatible with the BeagleBone Black so be sure to check compatibility ( http://www.elinux.org/BeagleBone_Black_Capes ). One unique feature of the BeagleBone Black is built in support for the Javascript node.js BoneScript library.
Advantages: Low cost, Linux based, ARM7, Performance, Large number of GPIOs
Disadvantages: Small community, Poorly supported default Linux distribution
Summary
The Arduino and the AVR microcontrollers are best for low cost, hard real time, low power, standalone applications, such as wearable electronics, driving LEDs, and simple control applications.
The Netduino and NETMF systems are best at networked complex soft real time control applications. The NETMF microcontrollers are particularly strong if you are interfacing to other Microsoft technologies, such as DWPS or WCF web services.
If your project is graphics intensive the Raspberry Pi is the clear winner. The RPi running Raspbian Linux also makes a great low end development platform.
The BeagleBone Black has the most capable hardware. If you are pushing the limits of performance or available I/Os the BBB could provide the extra capacity you need.
The Raspberry Pi is an inexpensive , under $50, small single board computer using a Broadcom BCM2835 chip that includes a 700Mhz ARM processor. The system also supports HDMI graphics and ethernet. You will need to supply your own 4GB or larger SD card for storage. The board supports several Linux distributions. The easiest way to get started is with the NOOBS (New Out Of the Box Software) install. Raspbian, a version of Debian Linux targeted for the Raspberry Pi that’s maintained by the Raspberry Pi Foundation, is recommended for the initial install. The Pi is inexpensive enough to use as an embedded system and powerful enough to use as a low end Linux development system. In fact I have my Pi configured as an Arduino development system! I also use CuteCom to debug serial communications with my NetDuino and XBee modules. Clementine also makes the Pi into a great internet radio. I have to admit that I have been having so much fun using my Pi as a low end Linux box that I have not spent much time interfacing it to hardware. The Pi can support: 8 GPIOs, 1 serial port, 1 SPI bus, 1 I2C bus. There are some really interesting projects available to support device control with the Pi. Adafruit has a customized Linux distro targeted at educators and makers: Occidentalis. You can use just about any programming language to program the Pi, hey it is Linux after all. However, out of the box Python is probably the best supported. Python and the Idle3 IDE are installed by default on Raspbian. The RPi. GPIO library supports access to Pi GPIO pins. A good description of RPi I/O is available here: http://elinux.org/Rpi_Low-level_peripherals . The Pi was designed for “serious” I/O to be located on a daughter board. A list of expansion boards is available at elinux.org.
Advantages: Low cost, Graphics, Linux based, large community
Disadvantages: No default hard realtime support, Linux overhead, GPIO support still evolving, no analog I/O, ARM6